Geometric camera calibration is a fundamental step for machine vision and robotics applications
— P. Galeone
If you have explored camera calibration before you might have also seen these standard pictures depicting image withand without distortion.
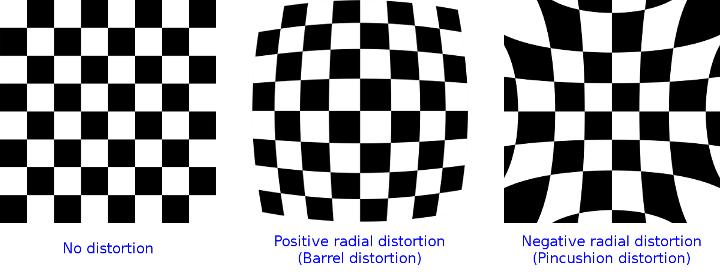
Camera calibration is a technique basically used to convert a distorted image to an undistorted one. The point in world coordinates represented by three dimensions is reduced to 2 dimensions in an image plane. We need calibrated images to properly obtain a 3D interpretation from this 2D image. Interaction of a robot with environment is heavily depended on how calibrated the camera is to provide distortion-less images. When horizontal and vertical lines appear as convex curves it is called Barrel Distortion and when they appear as convex curves it is said be Pincushion distorted. In this blog post, we will cover how camera calibration is performned.
Homography is the projection/mapping of 3D space to 2D space or a 2D image of one camera to 2D image of another camera. In other words, A linear transformation within 2D is called a Homography . 2D to 3D correspondence is known as Classical Correspondence and 2D to 2D is called as Self-Calibration.
